Projects

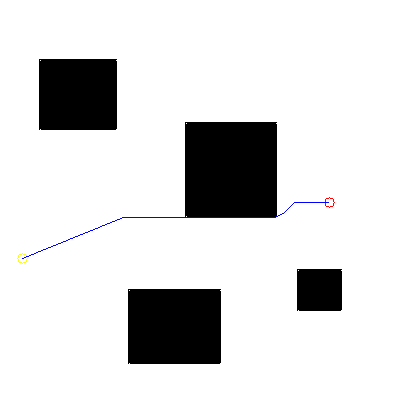
Hybrid A* Path Planner
This is a search-based motion planner for non-holonomic vehicles navigating in unconstrained environments integrated with Gazebo ROS framework and tested successfully on AGV, IIT KGP’s autonomous car.
Island Search Algorithm
This is a novel heuristic search algorithm that reduces number of state expansion given the knowledge of "Island" nodes.

Language Driven Outfit Style Enhancement
This is a tool for stylising one's clothing through textual description using GANS.
The image shown was the result of textual description "Purple Flower".
The image shown was the result of textual description "Purple Flower".
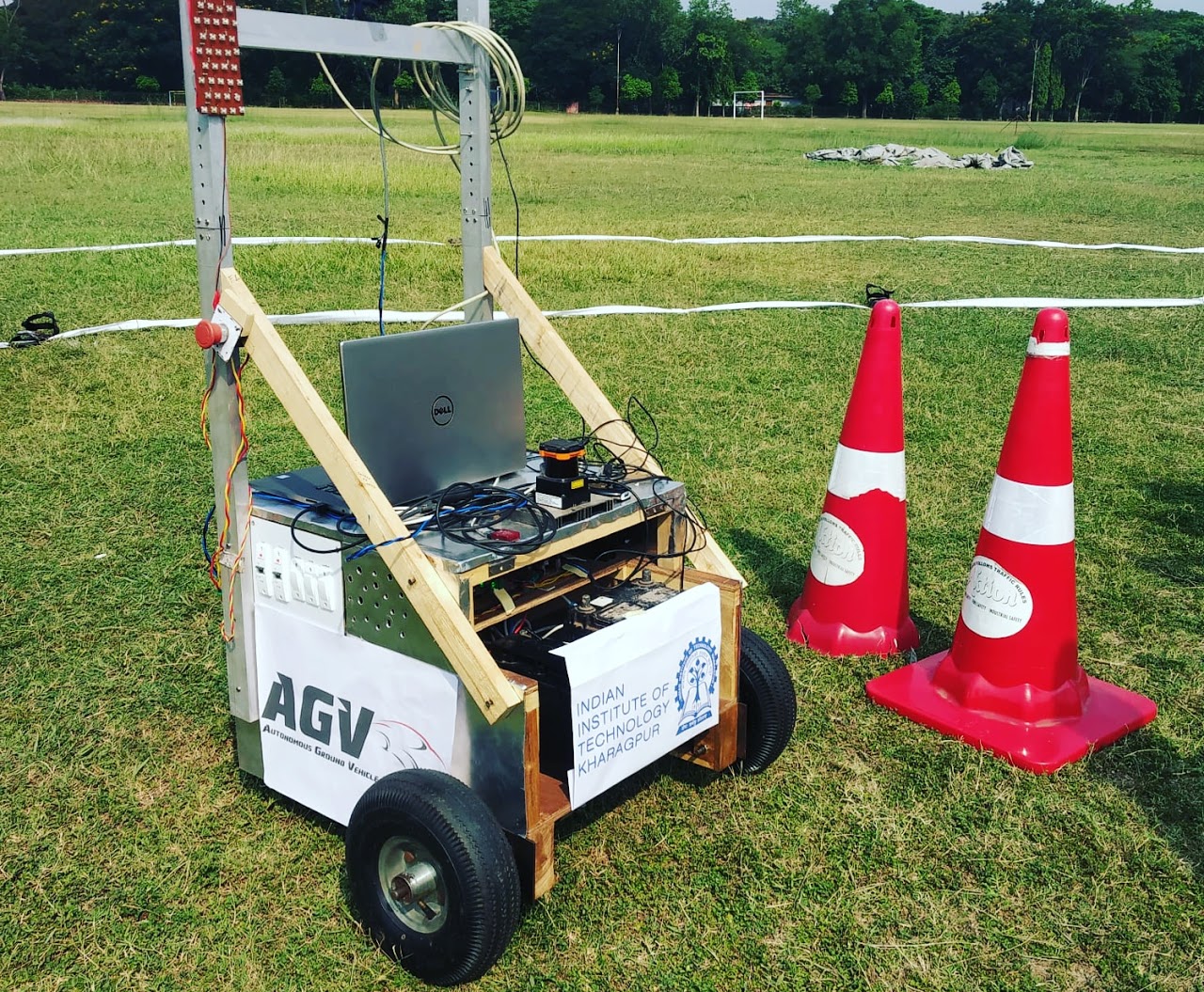
Eklavya 6.0
My team AGV IIT KGP participated in Auto-Nav Challenge at The 27th Annual Intelligent Ground Vehicle Competition held at Oakland University in Rochester, Michigan and finished runners up.
Publications
- Real-time Lane Detection, Fitting and Navigation for Unstructured Environments in International Conference of Image, Video Processing and Artificial Intelligence, China(2019) : S Shrivastava, et al.
- A Prototype of an Intelligent Ground Vehicle for Constrained Environment: Design and Development in IEEE International Conference on Control and Robots, South Korea(2019) : S Shrivastava, et al.